¿Por qué confiar su negocio a nosotros?
Eliminamos el pánico de las compras. Almacenamos millones de piezas difíciles de encontrar de nuestras fuentes confiables. Actualizamos nuestros listados de productos por minutos, y las compras en línea se completan en tiempo real y se envían todos los días.
Fundada en 2002, MFGChips es un líder local en distribución de componentes electrónicos, y también es reconocida como una de las empresas más respetadas e innovadoras en el mercado local actual. Con sede en Hong Kong, MFGChips se ha ganado una reputación impresionante por proporcionar un servicio excepcional y desarrollar soluciones eficientes y completas de la cadena de suministro global.
Aprende más >
CasaNoticiasHMI basada en computadora portátil para control de velocidad y dirección de motores de CC
HMI basada en computadora portátil para control de velocidad y dirección de motores de CC
Los motores de CC suelen controlarse con interruptores o botones de dirección y un potenciómetro de velocidad.Si bien el potenciómetro sigue siendo eficaz para regular la velocidad, este sistema ofrece una alternativa que permite el control de velocidad y dirección de un motor de CC (hasta 36 V) directamente a través de una computadora portátil.Integra una placa Arduino Uno para comunicación serial con una interfaz gráfica de usuario (GUI) desarrollada mediante Processing.(Processing es un lenguaje y entorno de programación gratuito y de código abierto para crear gráficos, animaciones y aplicaciones interactivos). La GUI funciona como una interfaz hombre-máquina (HMI) basada en una computadora portátil, lo que proporciona un control fluido del motor basado en pantalla.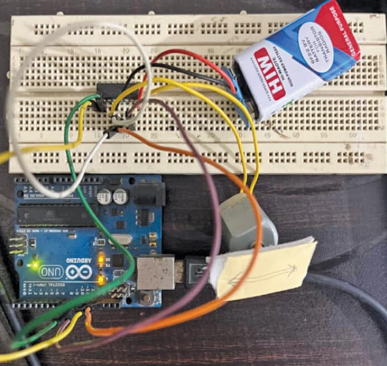
Los componentes necesarios para ensamblar el hardware se enumeran en la Tabla 1 de la lista de materiales. Un prototipo del sistema del autor basado en una placa se muestra en Circuito y funcionamiento.
La Fig. 2 muestra el diagrama de circuito de la HMI basada en una computadora portátil para el control de dirección y velocidad del motor de CC.El sistema se construye utilizando una placa Arduino Uno (MOD1), el controlador de motor IC L293D (IC1), un motor de CC (M) y algunos componentes de soporte.Se debe utilizar una fuente de alimentación separada de 9 V para el motor en lugar de combinarla con la fuente de alimentación del Arduino.La placa Arduino requiere un suministro dedicado de 9V.Se utiliza un cable USB para la programación.
El sistema funciona a través de comunicación en serie entre la GUI del portátil y la placa Arduino.La GUI envía comandos de control al Arduino a través del puerto serie USB.Al recibir estos comandos, Arduino los interpreta y activa el motor mediante el controlador L293D.Específicamente:
Comando 0: Mueve el motor hacia adelante
Comando 1: Detiene el motor
Comando 2: Invierte la dirección del motor.
Comandos 3 a 255: representan valores de PWM para control de velocidad
Software
En este sistema se utilizan dos conjuntos de códigos: